TYPE-2
For a TYPE-2 force platform, the ORIGIN parameter defines a vector pointing from the origin of the force plate coordinate system (the point where an application of Fx, Fy, or Fz will produce zero moment signals) to the point at the geometric center of the physical force platform working surface. The vector described by the ORIGIN parameter must be expressed in the force platform coordinate system and locates the center of the working surface of the force plate within the force plate coordinate system. This means that when the force plate is mounted in the floor, the Z component of this vector will be negative when the force plate origin lies below the physical surface of the force plate.
The information supplied by the force plate manufacturer must be read carefully when the values of the ORIGIN parameters are determined. Where several force plates are used it is important to remember that the values for each plate and manufacturers calibration descriptions may change from one plate to another depending on the calibration information supplied with each plate.
The original AMTI calibration method describes the origin of the force plate coordinate system as an offset to the geometric center of the top surface of the plate, thus describing the Z offset as a positive number. However, calibration data from more recent force platforms describe the location of the force plate coordinate system as an offset from the geometric center of the top surface of the plate resulting in a negative Z offset value in the manufacturer’s calibration information. The change in the descriptive convention affects only the sign of the Z offset – the force plate coordinate system does not change.
The force plate offset vector described by the ORIGIN parameter should locate the center of the working surface of the plate relative to the force plate measurement origin and in the force plate coordinate system. The direction of the force plate coordinate system axis (Z axis) that is normal to the working surface of the force plate (usually the vertical axis but the force plate could be on its side) is directed away from the working surface of the force plate. Thus, you must travel in a negative Z direction in the force plate coordinate system to reach the working surface.
C3D files created by many early Vicon systems may not store the correct ORIGIN values for TYPE-2 force plates because of errors in the installation documentation. Users who upgrade their laboratories from equipment installed prior to this time may continue to store the wrong values unless the force plate’s calibration is verified and the correct force platform origin values are entered.
Entering the wrong values for the ORIGIN parameter may produce errors in any application that calculates center of pressure, power, and moments as these calculations will assume that the force plate origin is above the force plate surface, based on the incorrect ORIGIN value.
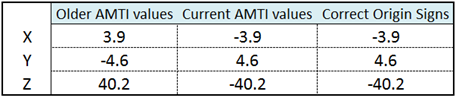
Figure 40 - Typical force platform ORIGIN values (dependent on the plate calibration).
The older AMTI documentation locates the force plate origin relative to the middle of the working surface and reported this vector in terms of the force plate coordinate system. As a result the sign of the origin values supplied in the AMTI calibration information needed to be changed when the values were entered into the C3D format ORIGIN parameters to align the force plate coordinate system with typical motion data collection coordinate systems, something that was often overlooked during the initial data collection configuration. Current AMTI calibration documentation provides origin signs that match the description of the ORIGIN parameter.